SLAM in ROS1
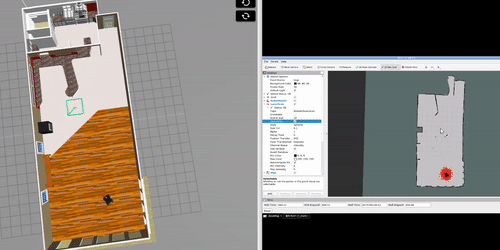
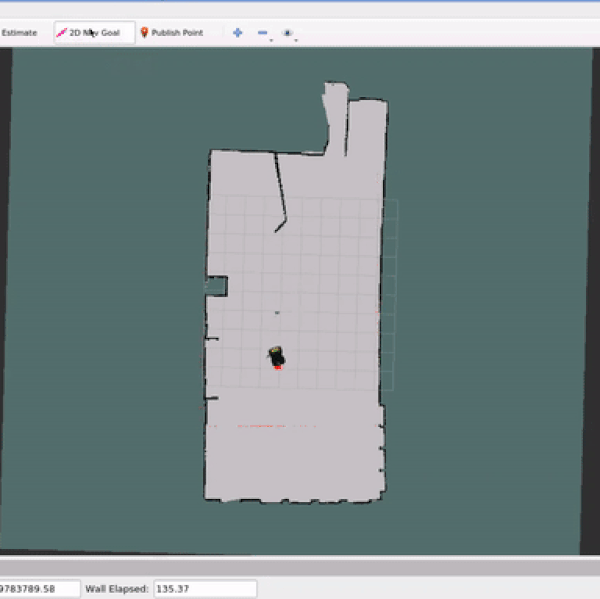
In this project, I explored advanced navigation techniques for the Turtlebot3 robot by implementing the gmapping SLAM algorithm to create an Occupancy Grid Map for indoor mapping. This approach allowed the robot to generate accurate maps of its environment and enabled more efficient navigation. To further enhance the robot's localization capabilities, I used the Adaptive Monte Carlo Localization (AMCL) package, which provided real-time updates to the robot's position within the map.
To ensure seamless navigation, I employed the move_base node in combination with the navfn global planner and the dwa_local_planner for dynamic trajectory generation. These elements worked together to enable the Turtlebot3 to effectively navigate through complex indoor environments while avoiding obstacles and dynamically adjusting its path based on real-time sensor data. This project demonstrated the potential for utilizing advanced algorithms and ROS packages in developing sophisticated robotic navigation systems.