Wrapped Haptic Display for communicating Robot learning
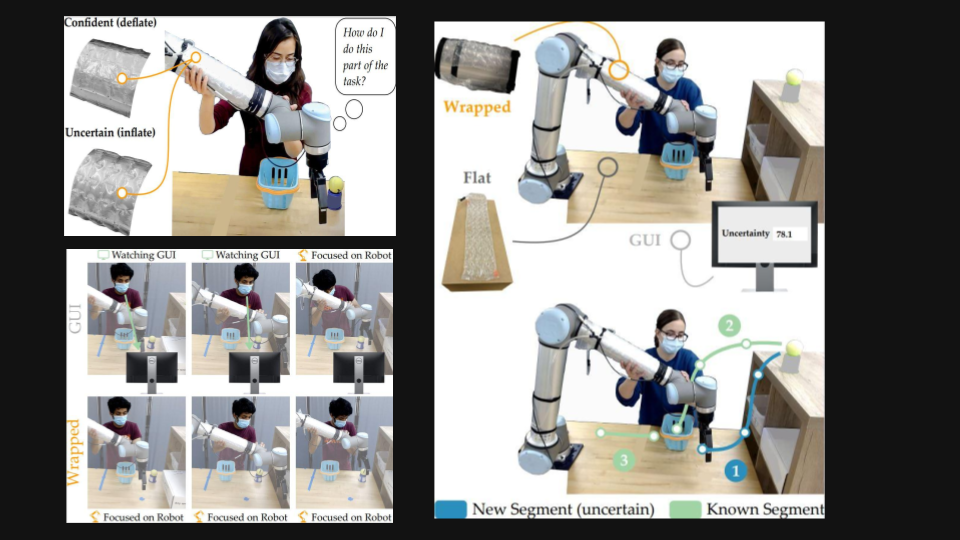
During my time as a Graduate Research Assistant at the Collaborative Robotics Lab from June 2021 to May 2022, I played a crucial role in advancing the field of human-robot interaction. I contributed to the publication of two research papers, focusing on the development and implementation of pneumatic haptic interfaces that wrap around the UR-10 robotic arm. These interfaces were designed to bridge the communication gap between humans and robots through effective robot learning.
By utilizing the Ensemble DAgger imitation learning algorithm on the UR-10 robotic arm, I successfully improved the learning efficiency by approximately 7% and significantly reduced the teaching time by around 20% when compared to existing baselines. This achievement demonstrates the potential for more effective and efficient human-robot interaction in various applications.
Throughout this research project, I honed my skills in robotics, programming, and artificial intelligence. I also gained invaluable experience working with cutting-edge technology and collaborating with a team of dedicated researchers. This opportunity allowed me to develop a deeper understanding of the challenges and possibilities in the field of robotics, and I am eager to continue making meaningful contributions to this rapidly evolving discipline.