Manipulation using Fetch Robot Perception
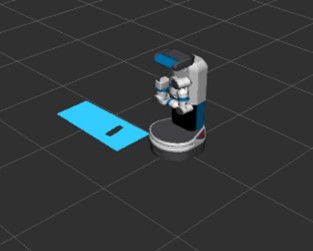
In this hands-on robotics project, I utilized point cloud perception with a Fetch robot to identify the locations of objects within the environment. After determining their positions, I employed inverse kinematics to accurately calculate their coordinates. To grasp the objects, I leveraged the manipulation tools provided by the MoveIt! package, ensuring effective and precise object handling. This experience allowed me to gain practical knowledge in perception, kinematics, and manipulation while working with advanced robotic systems, further enhancing my skills in robotics and broadening my understanding of real-world applications.