Tendon Based Actuation for Soft Robotic Bat head
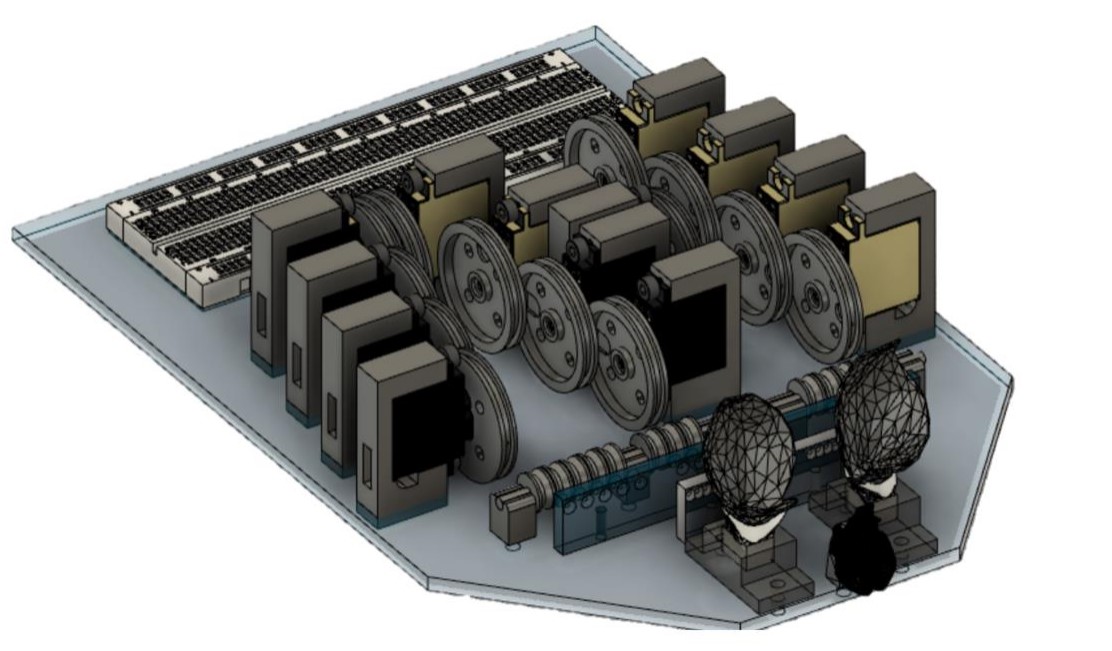

During my senior year of undergraduate studies, I participated in a design project focused on creating a tendon-actuated soft robotic bat pinnae and noseleaf. As part of a team of seven mechanical engineering seniors, one faculty advisor, and two graduate students, my primary responsibilities included system integration, performance testing, selecting appropriate servo motors as actuators, and implementing code in the microcontroller. Additionally, I helped choose the right silicone material for the bat pinnae and noseleaf and determined the material properties of molded silicone using an Instron machine. Our innovative approach led to a more robust, approximately 28% smaller, and 61% lighter Batbot compared to previous iterations, closely mimicking bat pinnae and noseleaf movements by adding degrees of freedom. This hands-on experience provided valuable insights into teamwork, problem-solving, and system design.