Motion Capturing of a four legged robot
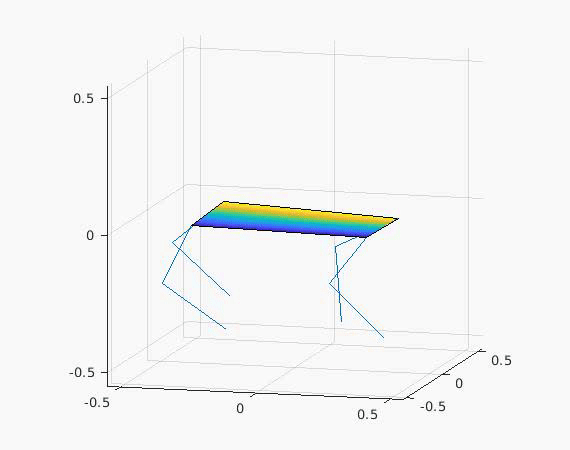
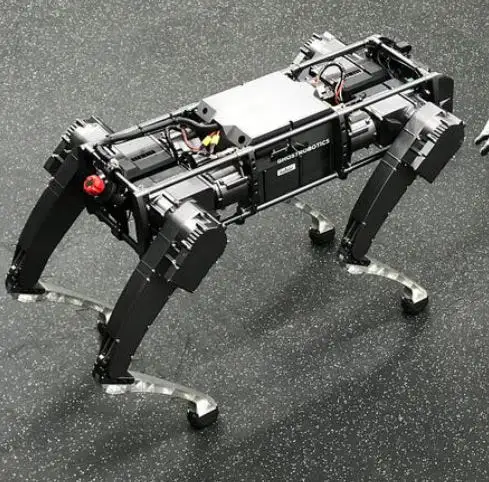
In my junior year of undergrad, I worked as an Undergraduate Research Assistant at the Hybrid System and Robot Locomotion Lab (HDSRL). My primary responsibilities involved capturing the motion of a Ghost Robotics' four-legged robot using Motion capturing technology (Motive) and creating MATLAB GUIs to animate the captured motion. This experience allowed me to develop my skills in motion capture and robotics while gaining practical experience with cutting-edge technology.